
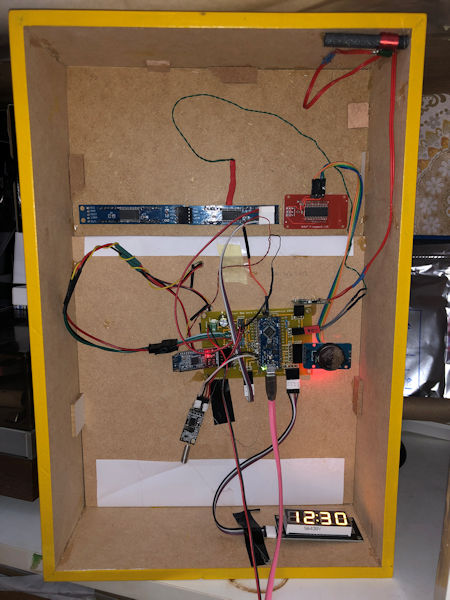
The DCF77-receiver hangs 10 cm away from the signal interfering LEDs and segment displays
| <-- Back | |
|
|
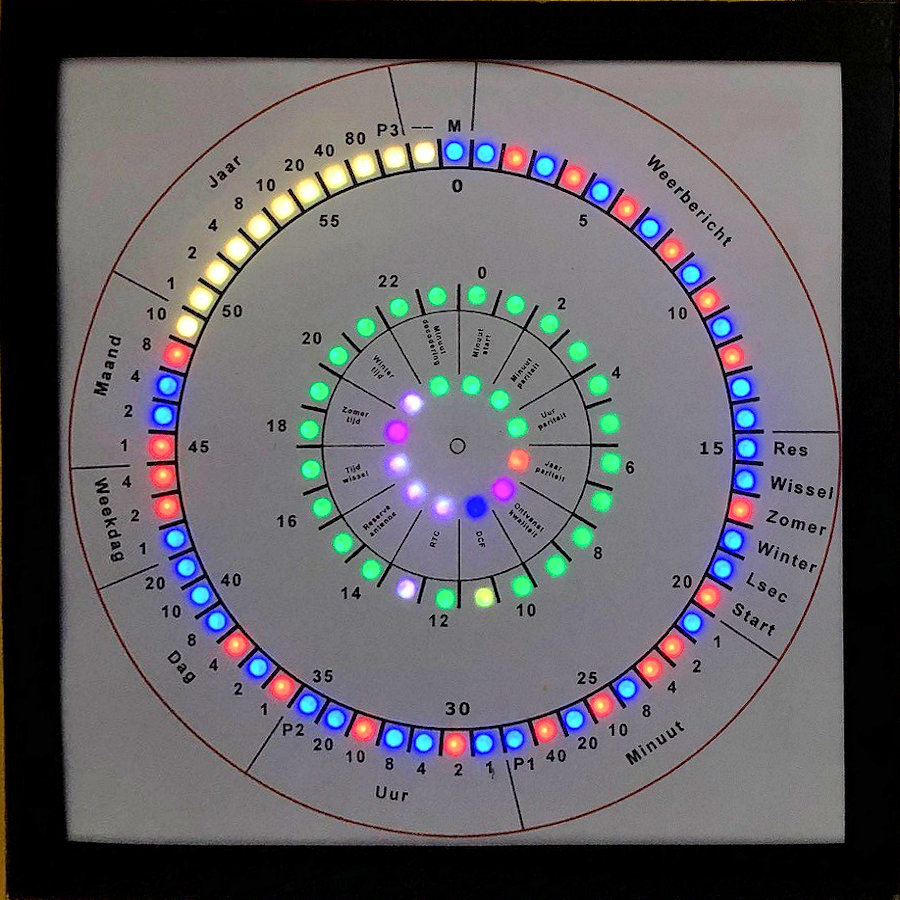
| Front (The colours of the LEDs are in real much more vivid) | Inside the clock (3:55 hours later) The DCF77-receiver hangs 10 cm away from the signal interfering LEDs and segment displays |
Introduction
This clock decodes the DCF77-signal, displays the received DCF77 bits and various information parameters in three WS2812 RGB-rings.
After decoding it sends the time as a string into the ether with a HC-12 433MHz Wireless Serial Transceiver.
with a Bluetooth module the clock can be controlled and statistics about the received signals retrieved
The time is displayed with a 4-digit 7-segment
HK16K33 and a 4-digit 7-segment
I2C-TM1637 display.
(I prefer the TM1637 displays but bought the by accident HK16K33 displays.)
The received or calculated information is displayed with MAX7219 8-digits 7-segment displays.
The software makes use of an algorithm that collects the readings without using interrupts (DCFNoInt) in contrast with the DCF77 Arduino library that uses interrupt to detect a pulse change.
In this DCFNoInt-program the processor is able to collect, in it spare time, over 30,000
low or high signals.
In Mainflingen, Germany, a transmitter send on the long wave frequency of 77.5 KHz
a signal that can be on or off (high or low).
Every second the signal is on for 0.1 second or 0.2 second.
That translates in respectively a 0 or 1 bit.
The time is decoded in a binary-coded decimal format as shown in the picture below.
The DCFNoInt-algorithm is sensitive for long delays() in the code. The sample program demonstrates a method to avoid delays.
An advantage of this non-interrupt method is it smoothens spikes in the signal and does not require filtering because it takes an average of the received positive pulses.
Not all programs can be made 'uninterruptable' without long delays . Time consuming subroutines can make the pulse readings
less usable.
The menu contains an option to read the pulses every x msec for y msec long. By playing with the x and y values the readings may be
optimized for a program with long running subroutines.
|
|
| It is also possible to make a smaller unit with a 24 LED ring and a HC-12 transceiver. See here how to make this receiver or modify this newer program V057 used for this DCF77-transceiver. |
The efficiency of the NoInt-method is comparable with the DCF77-library in the Arduino IDE from Thijs Ellenbaas.
With good reception both methods decode over 99%.
When reception is worse it depends on the signal. Sometimes the DCFNoInt-routine outperforms the interrupt routine by 50%.
The interrupt and non-interrupt methods are both used together in this program and increases the efficiency even further.
In this program both received times must be identical before it is written to the optional RTC-module or internal Arduino clock.
 |
|
| This is the result of a DCF77 receiver 5 cm away from WS2812 LEDs . These LEDs (but also the 7-segment displays) interferes the reception of the signal. From the 20365 minutes the original Arduino library (Th:) receives 5026 (25%) date/times correctly. The non interrupt algorithm (Ed:) decodes 9263 (45%) times the date/time. EdT: are the 1682 proper times but not proper dates received. |
|
| Combined the proper received times exceeded 75% (not shown). That is 3 times better. |
The Program
By turning on or off the #defines with a // in the program, one or both methods can be used.
#define DCFMOD // Use the Arduino DCF77 library with interrupts. #define DCFTINY // Use the DCFNoInt DCF algorithm in this program.This is the heart of the algoritm; just counting the positive signals and the total received signals.
SumSecondSignal += (!digitalRead(DCF_PIN)); // invert 0 to 1 and 1 to 0
SumSignalCounts++;
After 995 milliseconds it waits for the positive signal to drop to zero.
if((millis() - DCFmsTick) >995)) // Compute every second the received DCF-bit to a time
{
while (1-digitalRead(DCF_PIN)) // Avoid splitting a positive signal
{
SumSignalCounts++;
SumSecondSignal++;
}
These few lines took weeks of experimenting and solve why it lost every few minutes a good reception of the time.
The internal Arduino clock drifts more than expected. 1 second in less than 10 minutes.
In line 848 there is a correction possibility to make the calculation of the
pulse percentage close to 10% and 20%.
The signal length can be seen in the
serial monitor or Bluetooth connection with option A from the menu and of course
on the clock it self.
SumSignalCounts*=1.10;
// Correction to correct pulses to an average of 100 and 200 msecs
When the signal is decoded in line 913 a signal length
between 5.1 and 16% is a 0 bit and between 16% and 32% a 1 bit.
No signal for
a second is the start of a new minute and all other signal lengths are an error.
int msec = (int)(1000 * SumSecondSignal / SumSignalCounts); // This are roughly the milliseconds times 10 of the signal length
switch(msec)
{
case 0 ... 10: if (SumSignalCounts > 50) // Check if there were enough signals
{Bitpos = 59; Receivebitinfo = 2; Receivebit = 0; } // If enough signals and one second no signal found. This is position zero
else { Receivebitinfo = 9; Receivebit = 0; } // If not it is a bad signal probably a zero bit
break; // If signal is less than 0.05 sec long than it is the start of minute signal
case 11 ... 50: Receivebitinfo = 8; Receivebit = 0; break; // In all other cases it is an error
case 51 ... 160: Receivebitinfo = 0; Receivebit = 0; break; // If signal is 0.1 sec long than it is a 0
case 161 ... 320: Receivebitinfo = 1; Receivebit = 1; break; // If signal is 0.2 sec long than it is a 1
default: Receivebitinfo = 9; Receivebit = 1; break; // In all other cases it is an error probably a one bit
}
Errors are flagged in the Receivebitinfo and the flag
TimeSignaldoubtfull is set. When set the time/date is not reported.
The
decoding routine returns TimeOk = 5 as result.
When TimeOK = 1 then the Date
and time are correct. When TimeOk = 2 the date is possibly wrong but the time is
OK and differs less than 2 minutes from the previous received time.
Statistics are stored into EEPROM once a day at 0:00.
Statistics can be seen from the menu with option S
When A is pressed in the menu every second this line is printed
@MH. 4181 36100 11% (0) 14:42:47 05-01-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 8905 37769 23% (1) 14:42:48 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 4095 36086 11% (0) 14:42:49 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 4286 36099 11% (0) 14:42:50 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 4424 36059 12% (0) 14:42:51 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 4150 36099 11% (0) 14:42:52 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 3992 36100 11% (0) 14:42:53 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 3831 36058 10% (0) 14:42:54 05-09-2000/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 9440 38493 24% (1) 14:42:55 05-09-2020/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y @MH. 3783 36051 10% (0) 14:42:56 05-09-2020/6 F1 Ed:10943 Th:11094 Min:11717 OK:0 L:Y aWhen S is pressed
s ----> Statistics ----- DCFEd:10943 DCFNoInt algorithm DCF77:11094 DCF Arduino library Both:10537 Identical time at the same minute Valid times:11474 Valid times receive with both algorithms Total minutes:11717 Total time running DCF Eff:97% Signal:99 DCF Valid times in % and consecutive good minutes received (0-99) 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 -- Hour 60 60 60 60 60 60 58 60 58 60 56 58 58 54 60 60 58 60 56 58 58 53 60 55 -- Valid times NoInt 60 60 60 60 60 60 60 60 59 60 54 47 60 55 60 60 60 58 58 58 60 54 60 60 -- Valid times Int 03 03 04 03 03 05 00 03 04 02 03 07 03 17 01 01 02 05 03 01 03 02 02 03 -- Signal faults 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 56 57 57 57 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 57 58 58 58 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 05 03 03 02 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 1 2 3 4 5 6 7 8 9 10 11 12 00 00 00 00 00 00 00 54 00 00 00 00 00 00 00 00 00 00 00 55 00 00 00 00 00 00 00 00 00 00 00 19 00 00 00 00 0 1 2 3 4 5 6 7 8 9 Last 10 years (year modulo 10) 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00
DCF77 Lib OK --> 14:42 05-09-2020 The Arduino library decode a date/time TIME & DATE OK --> 14:42 05-09-2020 The DCFNoInt algorithm decode a date/time @L001|14:42:01 05-09-2020|DCF-eff:97% Signal:99 |DCF Line sent with the HC-12 T144202 Line sent with HC-12 to set time in my clocks
After two years statistics are:
----> Statistics ----- DCFEd:855591 DCF77:785000 Both:759415 Valid times:878673 Total minutes:1006933 DCF Eff:87% Signal:99 DCF 0 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 60 58 58 58 60 56 60 60 58 60 58 60 60 54 56 58 60 60 56 58 00 00 00 42 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 60 00 00 00 43 02 04 02 03 01 03 04 00 05 00 04 02 05 03 02 01 03 04 03 02 00 00 00 03 1 2 3 4 5 6 7 8 9 10 11 12 13 14 15 16 17 18 19 20 21 22 23 24 25 26 27 28 29 30 31 58 59 58 58 57 56 42 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 59 60 59 59 59 57 43 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 03 02 03 02 02 05 03 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 00 1 2 3 4 5 6 7 8 9 10 11 12 57 56 57 57 57 57 57 58 58 56 56 56 57 52 48 57 57 58 58 58 58 55 56 56 07 08 07 05 08 04 06 06 03 07 05 08 0 1 2 3 4 5 6 7 8 9 Last 10 years (year modulo 10) 08 52 56 00 00 00 00 00 00 00 57 56 55 00 00 00 00 00 00 00 15 09 10 00 00 00 00 00 00 00
The DCF77 algorithm stopped working for some time and has
a slightly lower score. After a restart of the clock the system worked again.
Yesterday around 23h the MAX7219 display did not react anymore and a power down
was needed.
The LEDs and Display
| The DCFNoInt (DCFTINY in the define) algorithm was developed to drive the LEDs of the clock. The clock contains three rings of 8, 24 and 60 LEDs. The outer ring displays the received bits per minute. blue = 0 and red = 1. The middle ring display the signal efficiency per hour and the current hour with a white LED. The inner ring displays various parameters. |
 |
 |
|
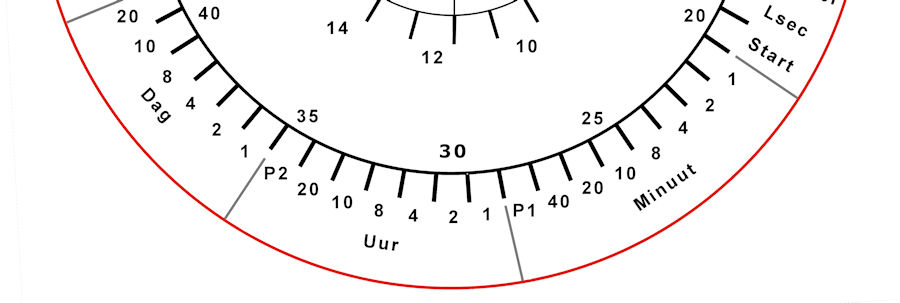
| Dutch design of the front display. I printed it on paper and placed it before the LEDs. | |
A TM1637 or HT16K33 display shows the current time.
A MAX7219 display is used to show the pulse width in msec, and the time as it is decoded by the algorithm
and the decoding efficiency in time as a percentage.
In the first seconds
it displays the valid received times and total minutes it is running and then
the date as 'ddmm'
After 20 seconds the right four digits are the bit
received by the LDR that controls the light intensity of the LEDs.
So a lot
of info and changing digits.
The time is transmitted at 433 MHz with a HC12 transceiver
module.
The HC-12 can replace a Bluetooth module. They use the same baud rate
of 9600 bps. Only the RX and TX lines are switched.
The coding to get the
received characters from the module is identical.
With a Bluetooth module connected the DCF77 clock can be operated with a phone.
Search for "BLE HM-10 Terminal serial" for programs in the app stores of the
phone
On a PC/laptop with Bluetooth a connection can also be set up.
The Menu
The menu is as below and can be printed when entering the I in the serial monitor of the Arduino IDE
or on a phone when connected with the Bluetooth module.
*** DCF HC12 Bluetooth Transmitter ***
Enter time as: Thhmmss (T132145)
A DCF debug info On/Off
B Short DCF debug info On/Off
C Clear statistics
E Reset MAX7219
F Toggle full or interval DCFtiny readings
G (G20) DCF loop measures every (0-999) msec
H (H50) measurements in DCF loop (0-999)
I For this info
K Toggle HC12 transmission ON/OFF
Lnn (L5) Min light intensity ( 1-255)
Mnn (M90)Max light intensity (1%-250%)
N (N2208)Turn On/OFF LEDs between Nhhhh
O Turn Display ON/OFF
R Reset
S Print statistics
------------------------------------------
Ed Nieuwenhuys sep-2020
Brightness Min: 4 bits Max: 15%
LDR read Min: 0 bits Max: 187 bits
DCF loop every: 5 msec for: 25 times
LEDs off between: 22 - 08
------------------------------------------
Software version: V055 Station: L001
16:42:41 01-09-2020
The Electronics
An Arduino Nano Every is used to run the program.
Sketch uses 35859 bytes (72%) of program storage space. Maximum is 49152 bytes.
Global variables use 1553 bytes (25%) of dynamic memory, leaving 4591 bytes for local variables. Maximum is 6144 bytes.
 |
|
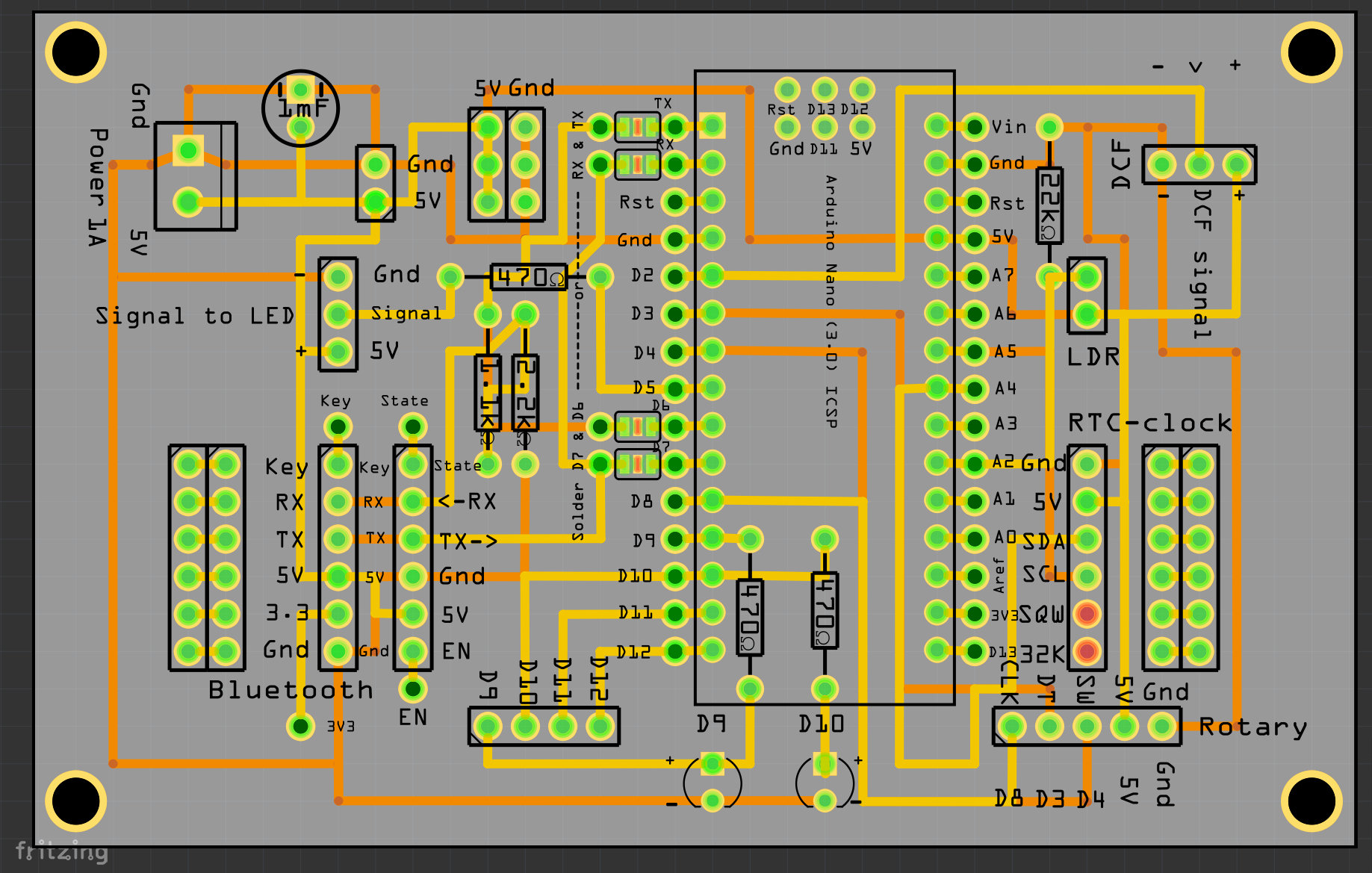
| Fritzing design of the PCB. | |
|
|
The parts are connected to a PCB (designed for my
Fibonacci and colour clocks).
A voltage divider with the 2.2 kOhm and 1.1 kOhm resistors lowers to voltage from 5V to 3.3V for the Bluetooth module
The 470 Ohm resistors are used between the two LEDs and between the signal line of the WS2812 LEDs and the processor.
The 22 kOhm resistor gives good results with the GL5528 LDR photo resistor.
A 1000 uF capacitor protects the circuit and the WS2812 LEDs against power spikes.
There is no need for a rotary decoder and these pins are used to connect the TM1637 display.
The following pins are connected:
// Digital hardware constants
DCF_PIN = 2, // DCFPulse on interrupt pin
CLK_TM1637 = 3, // PIN 3 TM1637Display
DIO_TM1637 = 4, // PIN 4 TM1637Display
LED_PIN = 5, // LED rings on pin PIN 5
BT_TX = 6, // Rx-pin on BT-mod to TX-pin on Arduino
BT_RX = 7, // Tx-pin on BT-mod to RX-pin on Arduino
HC_12TX = 8, // RXD on HC-12 to TX Pin on Arduino
HC_12RX = 9, // TXD on HC-12 to RX Pin on Arduino
MAX7219CLK = 10, // MAX7219CLK
MAX7219CS = 11, // MAX7219CS
MAX7219DataIn = 12, // MAX7219DataIn
DCF_LED_Pin = 13 // Show DCF-signal
};
// Analog hardware constants ----
EmptyA0 = 0, // A0
EmptyA1 = 1, // A1
PhotoCellPin = 2, // A2 LDR
EmptyA3 = 3, // A3
SDA_pin = 4, // SDA I2C pin for HT16K33 time display and DS3231 RTC clock module
SCL_pin = 5, // SCL I2C pin for HT16K33 time display and DS3231 RTC clock module
EmptyA6 = 6, // Empty
EmptyA7 = 7 // Empty
Software
librariesForDCFtransceiver.zip
More info about clocks and DCF77 here:
https://ednieuw.nl/Woordklok/index.html
Ed Nieuwenhuys
13 September 2022